Makîneya Tengkirina Screw Robot a Hevkar a Şeş-Axe

Parametreya Amûrê
| Cins | GR-XFXZ950 |
| Gihiştina robotan | 950mm |
| Barkirina dawiya robotê | 16Kg |
| Platforma xwarinê | Tabloya rotary ya kontrola navendî + motora servo |
| Rêbaza xwarinê | Blow/a spirate lihevhatî ne |
| Berhema girtinê | %99.95 |
| Dabînkirina hêzê ya dixebite | AC220V |
| Çavkaniya hewayê ya xebatê | 0.4-0.7MPa |
| hêz | Nêzîkî 2.5KW |
| Rêbaza hevrêzkirinê destnîşan bike | Pozîsyonkirina dîtbarî |
| Pîvana derve (L*W*H) | 1400*1900*1950mm |
| Giranî (KG) | 800 |
| Rewş | Nşh |
| Garantiya pêkhateyên bingehîn | 2 Sal |
Taybetmendiyên cîhazê
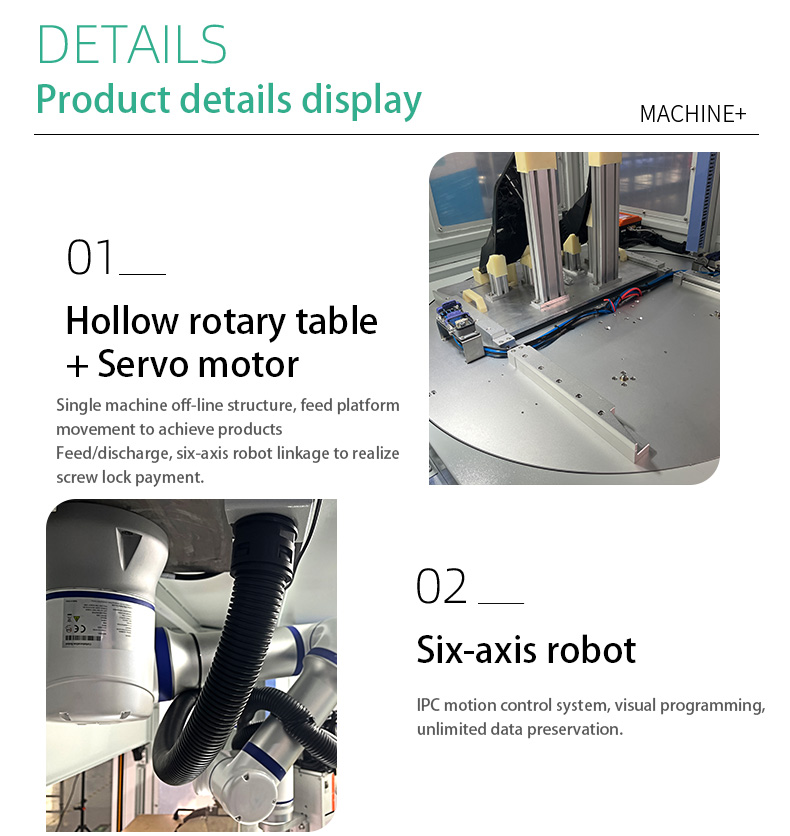
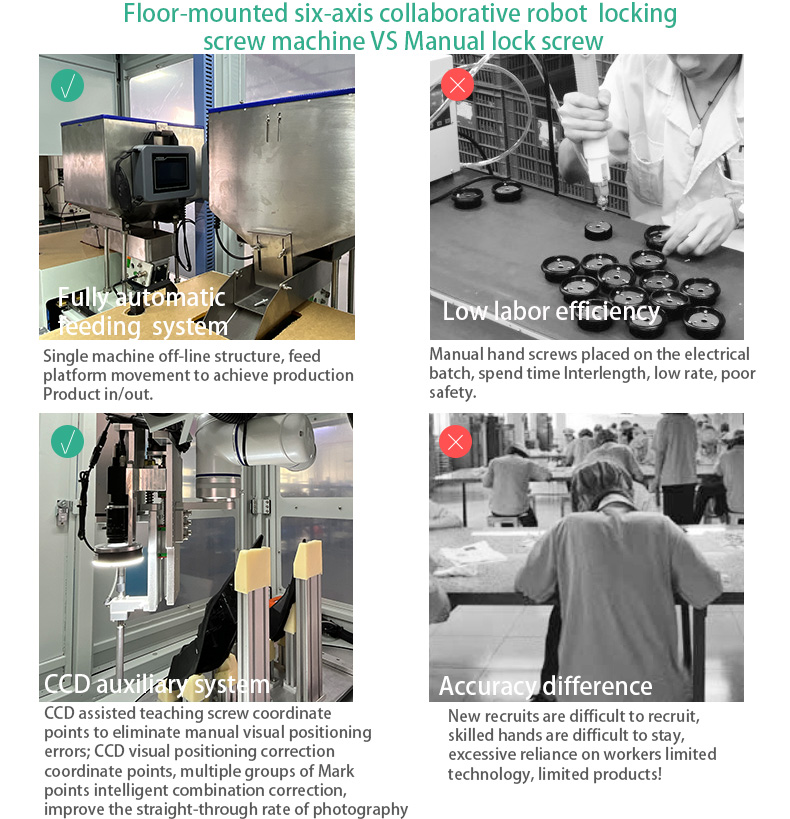
1. Avahiya negirêdayî ya yek-makîneyê, tevgera platforma xwarinê ji bo bidestxistina têketin/derketina hilberê, girêdana robotê ya şeş-eksen ji bo bidestxistina dravdana kilîta pêçanê
2. Sîstema kontrola tevgerê ya IPC, bernamekirina dîtbarî, hilanîna daneya bêsînor;
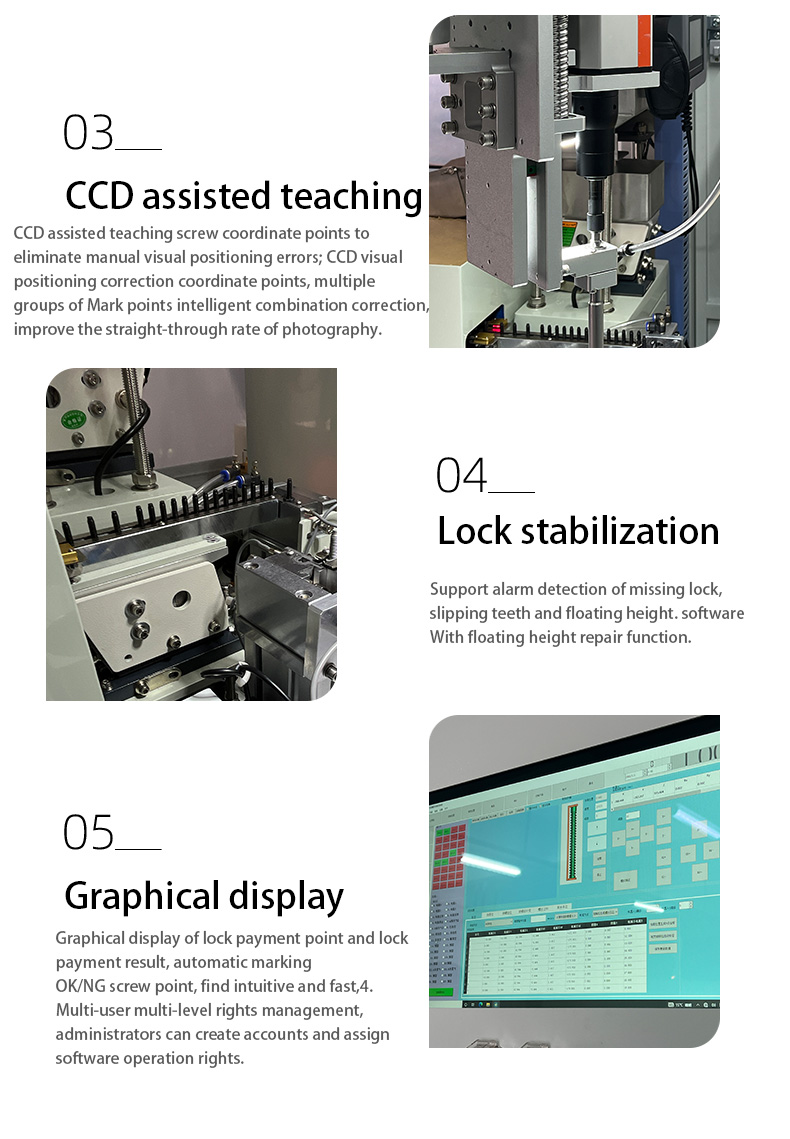
3. Xala dayîna kilîtkirinê û encama dayîna kilîtkirinê bi awayekî grafîkî nîşan bide, xala pêça OK/NG bixweber nîşan bike, bi awayekî hêsan û bilez bibîne;
4.. Rêveberiya mafên pir-bikarhêner û pir-astî, rêveber dikarin hesaban biafirînin û mafên xebitandina nermalavê destnîşan bikin
5. CCD bi alîkariya hînkirina xalên hevrêz ên pêçanê ji bo rakirina xeletiyên pozîsyona dîtbarî ya destan; Xalên hevrêz ên rastkirina pozîsyona dîtbarî ya CCD, gelek komên xalên Nîşankirî yên rastkirina kombînasyona aqilmend, rêjeya derbasbûna wêneyê baştir dike;
6. Tesbîtkirina alarmê ya windabûna kilîtê, şemitîna diranan û bilindbûna herikînê piştgirî dike. Nermalav bi fonksiyona sererastkirina bilindahiya herikînê tê;
7. Eksena Z dikare bi sensora cihguherîna lazerê (ji bo pîvandina bilindahiya herikbar) û sensora tespîtkirina zexta daketinê (vebijarkî) were mîheng kirin;
8. Koma elektrîkê dikare bi koma elektrîkê ya HIOS, koma elektrîkê ya leza Qili, koma elektrîkê ya servo, koma elektrîkê ya aqilmend, û hwd. (vebijarkî) were saz kirin;
9. Amûr dikarin MES-ê li gorî hewcedariyên xerîdar, wek torkê, hejmara zivirînan, Angle, xêza torkê, rewşa kilîtkirinê, bar bikin.
10. Skenkirina destî û skenkirina otomatîk dikare were hilbijartin (vebijarkî)
١١.. Daneyên hilberînê dikarin werin şopandin, û nermalav bi panelek kontrolkirina kalîteyê tê. Her cûre dane dikarin werin barkirin û dakêşandin (vebijarkî);
12. Kontrolkirina xala torkê ya otomatîk, encamên kontrolkirina xala torkê û lêpirsînê tomar bike (vebijarkî).

Hûrgulî