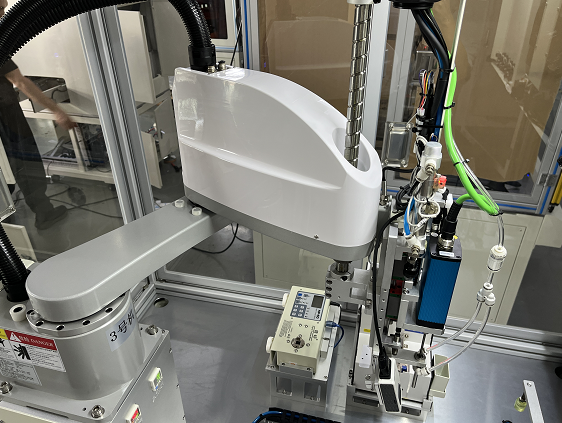
Makîneya Tengkirina Vîskê ya Tîpa Adsorpsiyonê ya Robotê Çar-Aksî

Parametreya Amûrê
| şanî | Taybetmendî |
| Cins | GR-XFSZ600/GR-XFSZ800 |
| Gihiştina robotan | 600mm/800mm |
| Navê marka | KESK |
| Peyvên sereke | pêça makîneyê |
| Lêdana mîlê xwarinê | 500mm/800mm |
| Mezinahî (D*F*B) | 1300*1000*1950mm/1500*1200*1950mm |
| Kapasîteya hilanîna bernameyê | 0-1200 mm/s |
| Leza tevgera eksê | 999 kom |
| Karîgeriya kilîtkirinê | yek pêç nêzîkî 2.0-2.5S e |
| Berhema girtinê | %99.98 |
| Dabînkirina hêzê ya dixebite | AC220V |
| Çavkaniya hewayê ya xebatê | 0.4-0.7MPa |
| erk | Nêzîkî 1.5KW |
Taybetmendiyên cîhazê
1. Avakirina negirêdayî ya serbixwe, platforma xwarinê ji bo hilberandina xwarin / dakêşana hilberê dimeşe, û girêdana robot a çar-axê kilîtkirina pîvazê fêm dike.
2. Sîstema kontrola tevgerê ya IPC, bernamekirina dîtbarî, teserûfa daneyên bêsînor;
3. Nîşandana grafîkî ya xalên kilîtkirinê û encamên kilîtkirinê, nîşankirina otomatîkî ya xalên pêçên OK/NG, lêgerînek hêsan û bilez;
4. Rêveberiya destûrên pir-bikarhêner, pir-astî, rêveber dikarin hesabên nû biafirînin û destûrên xebitandina nermalavê destnîşan bikin
5. Xalên hevrêzkirina pêçayî yên hînkirinê yên bi alîkariya CCD-ê ji bo rakirina xeletiyên pozîsyona dîtbarî yên destan; Xalên hevrêzkirina rastkirina pozîsyona dîtbarî ya CCD-ê, rastkirina kombînasyona aqilmend a gelek komên xalên Nîşan, Rêjeya derbasbûna yekem a wênekêşiyê baştir bike;
6. Tesbîtkirina alarmê wekî kilîta şikestî, diranên şemitok, avjenî û hwd. piştgirî dike. Nermalav bi fonksiyonek tamîrkirina bilindahiya avjenî tê;
7.7.Eksena Z dikare bi sensora cihguherîna lazerê (pîvandina bilindahiya avjeniyê), sensora tespîtkirina hêza daketinê (vebijarkî) were stendin;
8. Koma elektrîkê dikare bi koma elektrîkê ya HIOS, koma elektrîkê ya leza Qili, koma elektrîkê ya servo, koma elektrîkê ya aqilmend, û hwd. (vebijarkî) were saz kirin;
9. Amûr dikarin MES-ê li gorî hewcedariyên xerîdar, wek torkê, hejmara zivirînan, goşeyê, nexşeya xêza torkê, û rewşa kilîtkirinê, bar bikin.
10. Skenkirina koda destanî û skenkirina koda otomatîk dikare were hilbijartin (vebijarkî)
١١. Daneyên hilberînê dikarin werin şopandin, û nermalav bi kanbanek kontrolkirina kalîteyê tê. Hemû celeb dane dikarin werin barkirin û dakêşandin (vebijarkî); ١٢. Kontrolkirina cîhê torkê ya otomatîk, encamên kontrolkirina cîhê torkê hilîne û lêpirsîn bike (vebijarkî).
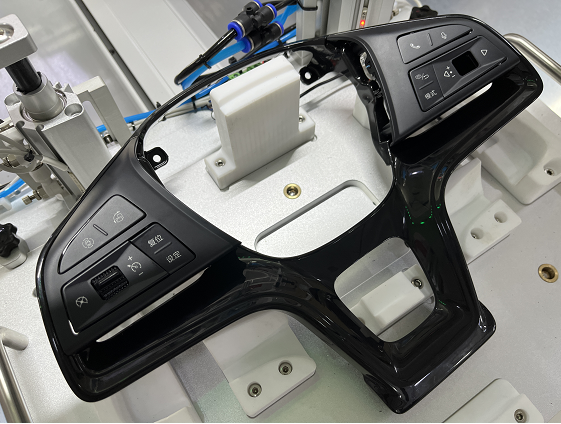
Nîşandana Hûrguliyan